A team of researchers from the University of Tübingen and the Technical University of Graz has printed a robotic arm in 3D that can simulate the movements of an elephant’s trunk.
Equipped with a gripper on the tip, the FDM-printed robot uses machine learning to roam and adapt to new tasks, such as picking up marbles and placing them on stages. Developed as a low-cost proof-of-concept, the design could eventually be used on an industrial production line where it would be able to perform a wider variety of flexible operations such as transporting auto parts or assembling of electronic devices.
Dr. Sebastian Otte, a co-author of the study, told New Scientist: “Our dream is that we can do this in a continuous learning setup where the robot starts without any knowledge and then tries to achieve goals, and while doing so. this generates its own learning examples. “

Industry 5.0: Elephant tribes
Elephant trunks are one of the best works of evolution. They are flexible and strong in equal parts, giving elephants a level of agility not often seen in the animal kingdom. As a result, they are a source of inspiration for many modern bionics projects in academia, where pneumatic actuators often act as artificial muscle fibers to achieve flexion and extension.
Otte and his colleagues opted for a modular design, which is based on a set of uniform, stackable joint modules, each with three degrees of freedom (DoF). The current design contains up to ten of these modules, but the robot’s length can reportedly be doubled through the use of more powerful motors.
Each segment in the trunk houses several motors that drive gears that can tilt the module up to 40 ° in two axes at the same time. In addition to bending, the robot trunk can also be lengthened and shortened – just like the real thing. Unfortunately, calculating the reverse kinematics for robotic actuators to perform complex operations is not an easy task, especially with so many DoFs. This is where artificial intelligence comes into play.

Spiking neural networks for navigation
The team used a so-called spiking neural network (SNN) to control the robot, an artificial neural network that closely mimics natural brain processes. In addition to including neuronal and synaptic states, SNNs also incorporate the concept of time into their models. By observing a series of training movements, the SNN was able to map motor movements into corresponding robot positions, allowing the team to ‘roll out’ the targeted navigation models with near millimeter precision.
The researchers write: “Not only have we shown that it is possible to build low-cost hull-like robotic arms with basic 3D printing equipment, but we have also shown how they can be controlled using the latest neural network architectures that are constantly expanding. “
As for future research, the team has suggested the possibility of incorporating radar-based range sensors to implement collision avoidance functionality, allowing the device to work with humans. Another route could be to translate the work into a snake-like robot rather than a stationary arm, which would allow it to ‘slide’ for search and rescue operations.

Further details of the study can be found in the article entitled ‘Many-Joint Robot Arm Control with Recurrent Spiking Neural Networks’. It is co-authored by Manuel Traub, Robert Legenstein and Sebastian Otte.
Low-cost robotics is a good example of how 3D printing can be used to solve abstract problems. A team of researchers from Meiji University, Tokyo, recently modified an FDM 3D printer to create a low-cost ‘all-in-one’ production robot. The Functgraph is able to automatically print and attach custom toolheads to change active functionality, allowing users to grab, rotate and break 3D printed objects to assemble complex mechanical systems in a single print job.
Elsewhere, scientists at the Chinese University of Tianjin have previously 3D-printed an adaptable robot capable of scaling and monitoring pipes in industrial facilities in real time. The one-piece device features a series of soft bending mechanisms and modular grippers, allowing for flexible climbing in oddly shaped infrastructure.
Subscribe to it Newsletter 3D Printing Industry for the latest additive manufacturing news. You can also keep in touch by following us Twitter and like us Facebook.
Looking for a career in additive manufacturing? Visit 3D printing jobs for a selection of roles in the industry.
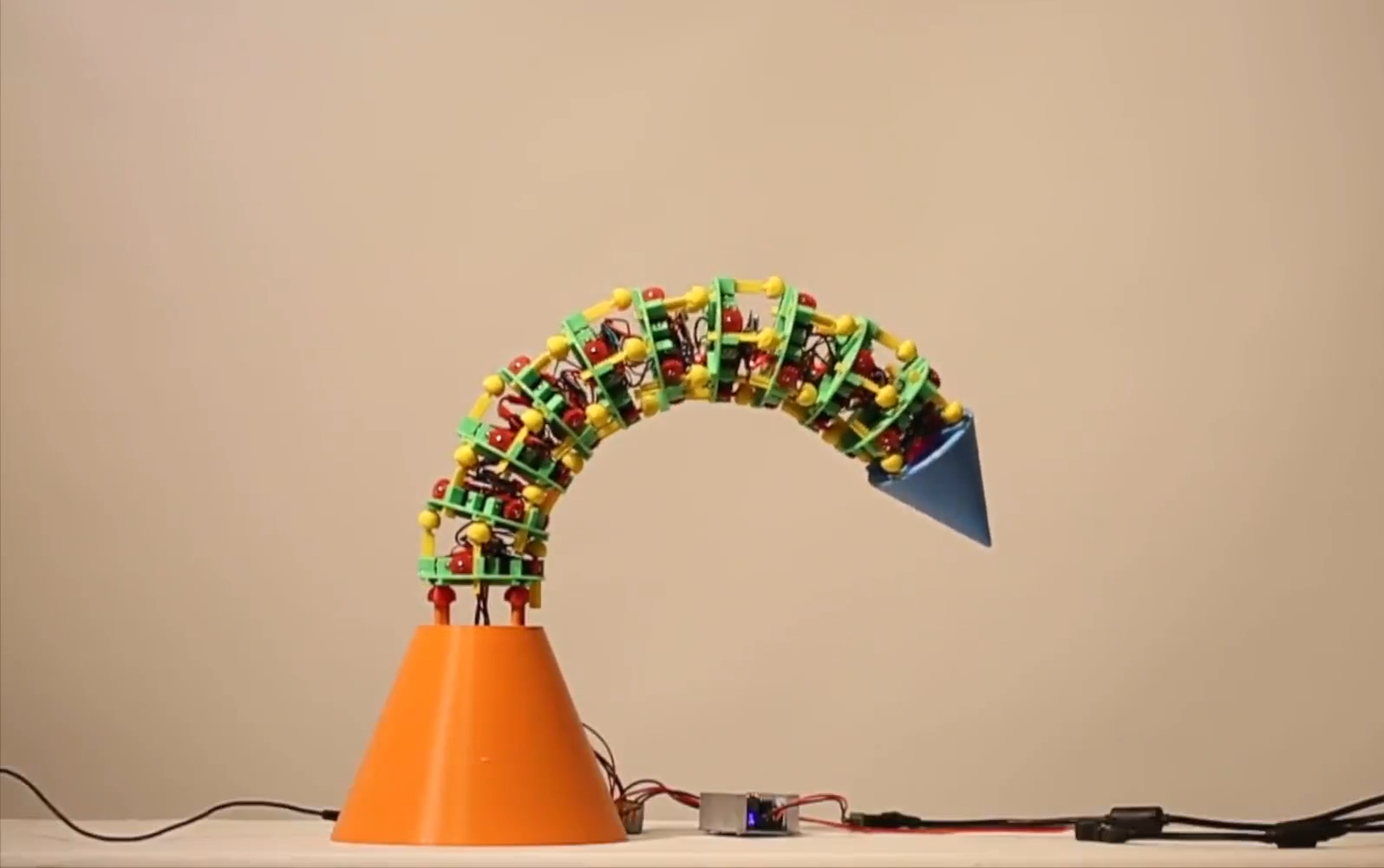
Featured image shows the trunk robot in full flexion. Photo via University of Tübingen.